¶ Vision board
¶ Overview
¶ 1. Introduction
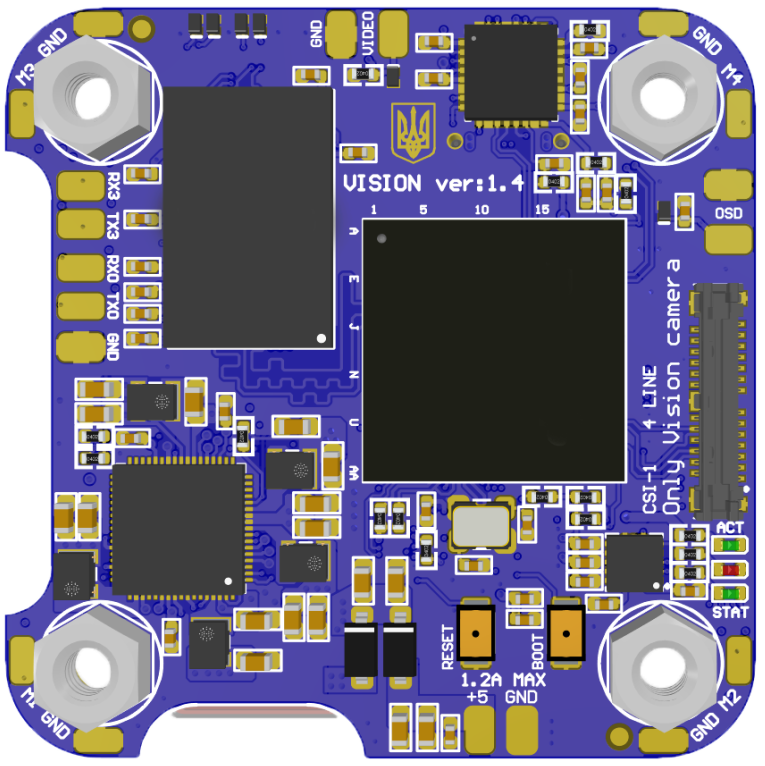
Vision v1.4 is an ultra‑compact single‑board computer designed for autonomous piloting and real‑time video processing in AI‑assisted FPV and robotics applications, optimized for tight size, weight, and power envelopes while maintaining high compute throughput for onboard perception tasks. It targets edge AI workloads such as object detection, tracking, and stabilization, integrating cleanly into digital FPV stacks and embedded systems that require low‑latency processing.
¶ 2. Specifications
| CPU | Quad-core 32-bit ARM Cortex-A7, RISC-V MCU, up to 1.5GHz |
| NPU | Up to 2.0 TOPs Support 8-bit/16-bit operation Support TensorFlow, TensorFlow lite, Pytorch, Caffe, Mxnet, Darknet, Onnx |
| ISP | 14MP ISP, 3-frame HDR |
| VPU | 4K H.264/H.265 30fps video encoding, 3840×2160@30fps + 1080@60fps encoding 4K H.264/H.265 30fps video decoding, 3840×2160@30fps encoding + 3840×2160@30fps decoding |
| RAM | LPDDR3 (512MB/ 1GB optional) |
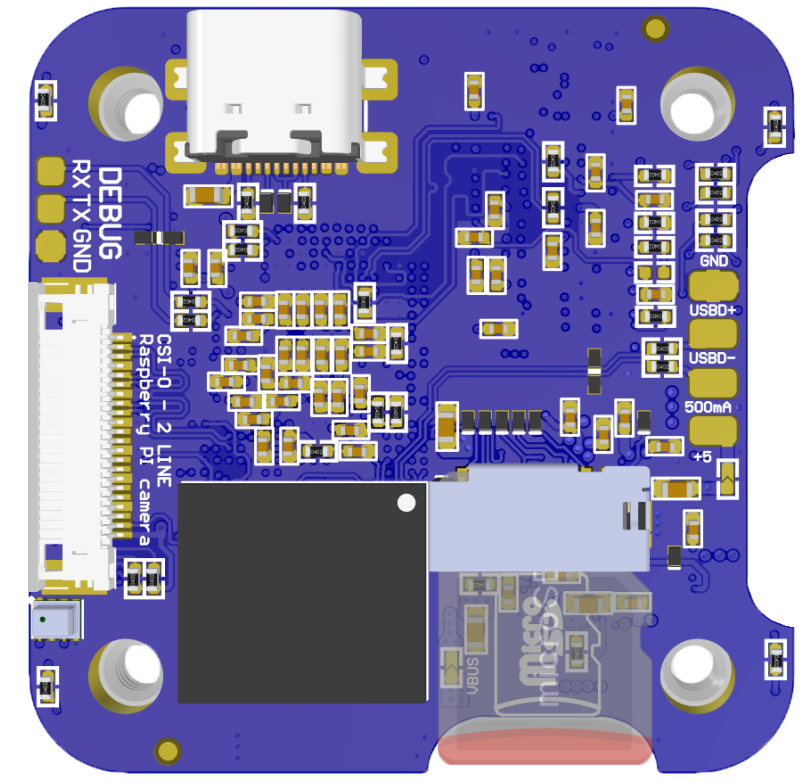
| Storage | eMMC (8GB/16GB/32GB/64GB optional). SDIO 3.0 interface for SD card |
| Power | Core board supply voltage 5V (voltage tolerance ± 5%) |
| OS | Linux (Buildroot+Ubuntu20.04+Debian) |
| Size mount | 30.5x30.5mm |
| Power consumption | Min:≈0.15W(5.0V/30mA) Normal:≈0.75W(5.0V/150mA) Max:≈3.25W(5.0V/650mA) + (USB ext 5.0V/500mA) |
| Environment | Operating temperature: -20℃~70℃. Operating humidity: 10%~90%RH (non-condensing) |
| Video Input | 2 * MIPI CSI (or LVDS/sub LVDS). Support simultaneous input from 2 cameras: 2 * MIPI CSI (or LVDS/sub LVDS) |
| Video Output | 1* analog composite video (CVBS). NTSC: 640 × 480 29.97fps Square Pixel. PAL: 768 × 576 25fps Square Pixel. BT.601/656: 720 × 480 29.97fps. BT.601/656: 720 × 576 25fps. |
| USB | 1xUSB 2.0 HOST, 1xUSB 2.0 OTG |
| Other | 3xUART, 2xI2C, 4xPWM, 2xLEDs, GPIOs, Optional: Gyro ICM-20602, Baro BMP280 |
¶ Revisions History
-
v1.4
-
v1.41
-
v1.5

